HIGHLIGHTS
- Human robot collaboration
- Collaborative robotics
- Machine learning
- Multimodal communication
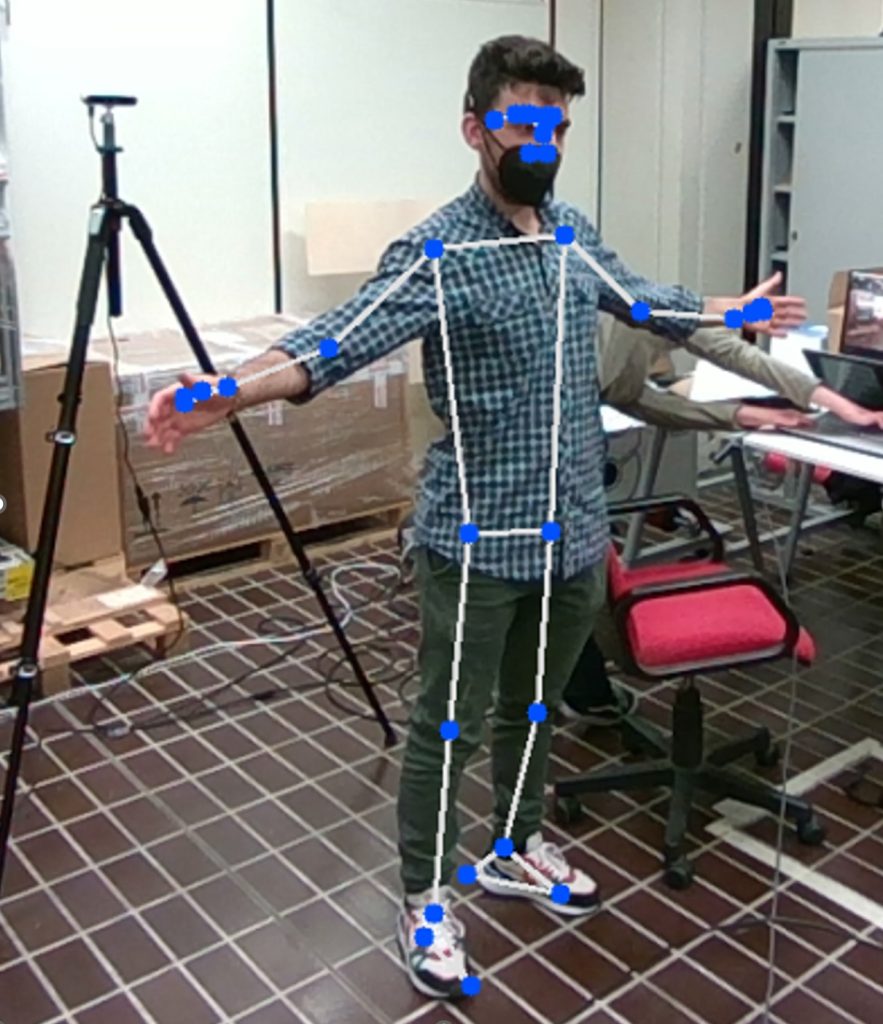
Skeleton detection in real-time effettuata tramite Intel real sense D455 e algoritmi di machine learning. Sono note in questo modo la posizione assoluta nello spazio cartesiano 3D di ogni singolo giunto del corpo umano.